深度學習技術對振動篩巖屑進行精準分類
時間:2020-08-10 11:29
來源:
作者:編譯/胡大梁
目前�,全球多數(shù)石油和天然氣公司的井眼維護和清潔均有完整的工作流程,每項工作都有規(guī)可循��,有助于保障井筒完整性并降低鉆井風險和成本�。但傳統(tǒng)方法需要人工連續(xù)觀察振動篩上的巖屑�����,并需要應用復雜的數(shù)理模型�,該方法已成為一種工作瓶頸��,因為人力難以實現(xiàn)連續(xù)監(jiān)測�����,因此無法提供對井眼清潔狀況進行準確評估����。為此���,休斯敦大學研究人員近期提出了一種實時深度學習模型�,該方法由三個模塊組成����,通過分析實時監(jiān)控視頻流,對來自鉆井平臺振動篩的巖屑量進行分類��。
以前的大多數(shù)工作都使用圖像分析技術對巖屑體積進行定量分析�,但傳統(tǒng)的圖像處理方法需要在圖形特征上進行大量工作�,由于原始數(shù)據(jù)通常雜亂無序����,因此需要進行預處理并對數(shù)據(jù)進行擴充。相反����,深度學習功能能夠自動從原始數(shù)據(jù)中發(fā)現(xiàn)關鍵特征,并建立分類所需的表示形式���,可以幫助克服在惡劣環(huán)境下設置監(jiān)控設備的困難�,并且可以放寬對巖屑量監(jiān)視系統(tǒng)的數(shù)據(jù)采集要求��。采用深度神經(jīng)網(wǎng)絡方法對來自遠程鉆井平臺振動篩的巖屑進行圖像處理和分類����,主要包括以下工作流程:
視頻幀提取:在鉆井過程中����,帶有泥漿的巖屑會傳輸至振動篩,研究人員開發(fā)了一種智能視頻處理引擎�,采用雙線程機制,用于實時讀寫源流,以自適應方式進行解碼��,如果解碼過程無法跟上視頻流的速度���,則可能會丟失同步幀和丟失幀�����。為克服此問題��,設置了提高快速線程安全的循環(huán)緩沖區(qū)����。對巖屑運輸?shù)秸駝雍Y時捕獲的視頻進行自動處理分析����,結(jié)果將被實時傳輸并呈現(xiàn)在辦公室的監(jiān)視器上���,使鉆井工程師可以迅速獲得巖屑量信息�����。
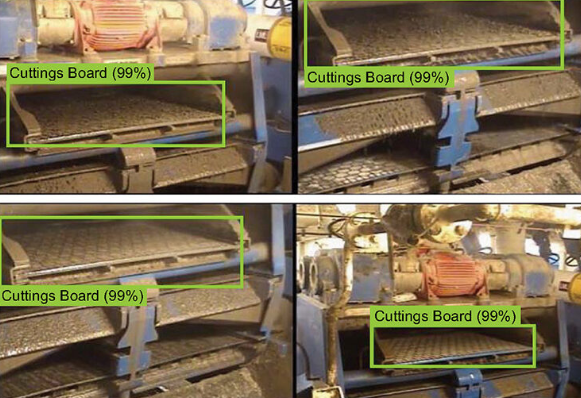
振動篩關注區(qū)域確定:為了獲得準確的結(jié)果�,工程師或開發(fā)人員需要從振動篩上巖屑流過的區(qū)域中確定重點的視頻關注區(qū)域,關注區(qū)域確定后�����,相機將不會更改其位置或角度�����,并濾除影響分類準確性的噪聲等外界干擾因素�,用戶也可以使用手動或自動方法來完成關注區(qū)域的選擇。在視頻流的解碼開始之前��,通過交互式圖形用戶界面將向用戶呈現(xiàn)指示振動篩的位置���,用戶只需從界面演示的第一幀中選擇四個角點即可突出顯示關注區(qū)域�����。對于某些振動篩�,在鉆井施工過程中���,工人可能故意或意外地稍微改變攝像機角度����,此時就需要重復選擇關注區(qū)域。為了使該過程自動化��,建立了一種更快的基于區(qū)域的卷積神經(jīng)網(wǎng)絡關注區(qū)域檢測方法��,可以自動檢測到包含巖屑流的區(qū)域���。將原始視頻幀作為輸入信息���,每個原始幀都被送入特征提取器,后者會生成特征圖�,特征圖被輸入到一個更小的卷積神經(jīng)網(wǎng)絡中,分類整理后區(qū)分為背景類或關注區(qū)域類�����。如果將區(qū)域確定為需要關注�,則區(qū)域回歸器將進一步調(diào)整其坐標、寬度和高度�����,實現(xiàn)自動關注���。
關注區(qū)域內(nèi)部隨機抽樣:在更快的卷積神經(jīng)網(wǎng)絡框架的基礎上,用戶可以在視頻流的開始通過手動選擇關注區(qū)域,也可以由插播區(qū)域自動選擇����。 但是振動或吹風可能會導致相機的位置和角度發(fā)生輕微變化,在沒有運動補償?shù)那闆r下訓練系統(tǒng)�,則會降低準確性,為此研究人員提出了一種隨機化的子采樣策略來克服這個問題���。
主成分分析增白轉(zhuǎn)換:主成分的增白轉(zhuǎn)換將立即應用于視頻幀����,然后再將其饋入神經(jīng)網(wǎng)絡����, 目標是減少輸入的冗余度,消除了相鄰幀之間的潛在相關性��,并有可能改善模型的收斂性�����。
為了評估方法的準確性�����,在實時視頻流上測試了所提出的方法,并將模型軟件的實時分類結(jié)果與工程師手動分析進行了比較�,將巖屑體積分為四個離散級別:超重、重�、輕和無,每個視頻都由四位專家標記����。測試結(jié)果表明,該系統(tǒng)可以在不丟幀的情況下實時處理流視頻�,并對所有巖屑類別進行了成功分類。與傳統(tǒng)的工程師手動標記分析的結(jié)果相比�����,該方法能夠?qū)崟r分類�����、處理速度快而且精度更高�����。

 微信公眾號
微信公眾號
 微信視頻號
微信視頻號





 京公網(wǎng)安備11010502053156號
京公網(wǎng)安備11010502053156號